From Sci-Fi to Reality: The Evolution of Surgical Microrobots
Written on
Chapter 1: The Intersection of Medicine and Technology
Imagine a future where surgical microrobots operate within your body, a concept that may seem far off but is rapidly approaching reality. The convergence of physics and medical science is paving the way for these untethered microrobots to navigate the complex networks of our biological systems.
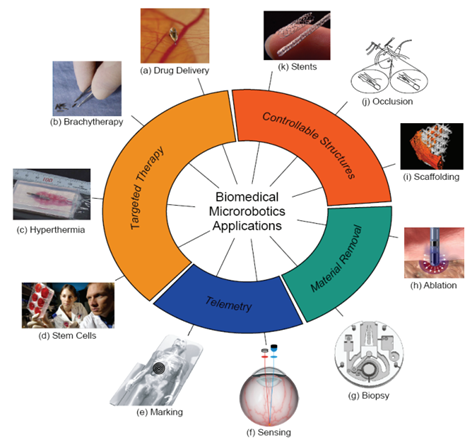
Have you heard of magnetically controlled microrobots? These innovative devices have garnered attention in various medical applications, such as delivering drugs and cells, as well as removing harmful substances. Additionally, microrobots can be powered through chemical fuels, sound waves, and electrical energy.
Electromagnetic Control Mechanisms
Consider the scenario depicted in Figure II, where a small magnetized particle symbolizes the microrobot navigating a Y-shaped blood vessel. Initially positioned at point A, the microrobot is influenced by an external permanent magnet that guides it to point B. To move from B to C, precise control, known as navigation and motion guidance, is essential.
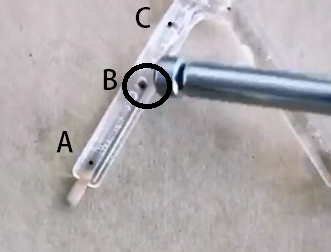
But why is this navigation necessary? Envision a scenario where cholesterol is obstructing your coronary artery; a microrobot could be deployed to eliminate this blockage. By applying principles from fluid mechanics and engineering dynamics, we can create a dynamic model that accounts for all forces acting on the microrobot in a viscous environment, simulating its operation within the blood vessels. It's important to clarify that the illustration uses a permanent magnet for demonstration purposes rather than an electromagnetic force.
However, both the density of the blood and its flow can impede the microrobot's movement, necessitating a stronger pulling force to counteract the hydrodynamic resistance. This raises the question: what is the minimum electromagnetic force required to navigate the microrobot against pulsatile blood flow?
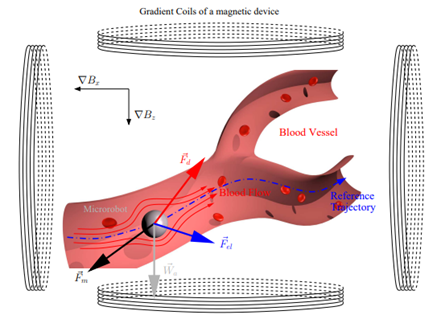
In summary, the forces involved include magnetic (F_m), hydrodynamic drag (F_d), electrostatic forces (F_e), and the weight of the microrobot (W_a). Can you calculate the net forces in the x and z directions?
Bio-Inspired Design of Microrobots
You might be curious about what microrobots are made from, including their shapes, materials, and fabrication techniques. These devices can be constructed from both soft and smart materials, and can exhibit brittle or ductile properties. Common materials include elastomers, hydrogels, and biomolecules, which facilitate dynamic movements, deformation, and morphological changes.
In this context, a spherical neodymium microrobot embedded with superparamagnetic nanoparticles presents a viable option. While neodymium microrobots remain static in shape and size, other types have been created using biological tissues rather than metal and electronics.
But do metals or potentially harmful substances come into direct contact with our tissues? Absolutely not! Biocompatibility testing is a critical step in ensuring the safety of medical devices, confirming that they interact safely with biological systems without causing harm or adverse reactions.
The OctoMag System
Among various power sources, generating electromagnetic fields has gained traction among researchers for its potential in facilitating wire-free, minimally invasive surgical procedures. Yet, one might wonder: could there be risks, such as a microrobot losing control due to a technical malfunction?
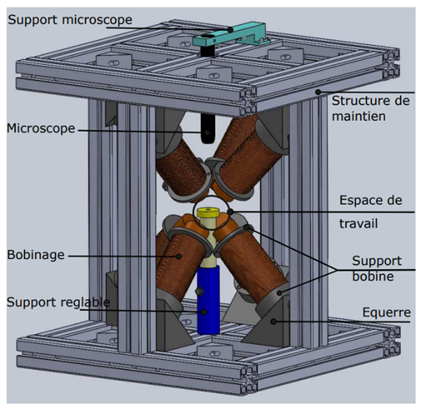
The OctoMag system, illustrated above, serves as a magnetic platform designed for high-precision control of tiny magnetic objects within micro and nanorobotics. You might think its size resembles that of MRI machines, so how does it fit within the human body? This presents a significant challenge known as the "workspace size."
While it may seem that increasing the distance between the coils in the OctoMag system could easily expand the workspace, the strength of a magnetic field follows an inverse-square law. Thus, widening the gap between coils leads to a diminished magnetic field strength. To address this, researchers create models by adjusting system variables, including coil dimensions, ferromagnetic configurations, and electric current values, to develop optimal designs that ensure appropriate workspace and magnetic field gradients.
Inaccurate predictions of these values can lead to imprecise control, which in turn could result in technical malfunctions that might harm surrounding organs or tissues.
Fabrication Techniques for Microrobots
3D printing technology typically yields static solid structures, as seen with the neodymium microrobot. In contrast, 4D printing enables the creation of objects that exhibit dynamic behaviors, allowing for adaptation, shape-shifting, and material property alterations.
Chapter 2: The Future of Surgical Technology
Explore the advancements in robotic surgery that are transforming healthcare.
The first video titled "Robotic Surgery! | Science Goes To The Movies" delves into the fascinating realm of robotic surgery, showcasing how technology is revolutionizing the medical field.
The second video, "Robot Surgeons and 4 Other Medical Advances That Sound Like Sci-Fi," highlights groundbreaking innovations that seem like they belong in a science fiction novel but are becoming part of our reality.
References:
[1] Nelson, B. J., Kaliakatsos, I. K., and Abbott, J. J. (2010). Microrobots for minimally invasive medicine. Annual Review of Biomedical Engineering, 12:55–85.
[2] Arcese, L., Fruchard, M., & Ferreira, A. (2013). Adaptive controller and observer for a magnetic microrobot. IEEE Transactions on Robotics, 29(4), 1060–1067.
[3] Chah, A., Kroubi, T., & Belharet, K. (2020, July). A new electromagnetic actuation system with a highly accessible workspace for microrobot manipulation. In 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) (pp. 723–728). IEEE.